


服務熱線
86-132-17430013


| 品牌 | 其他品牌 |
|---|
西門子代理商 開封西門子代理商 開封西門子代理商
在自動化領域,新的技術突破即將出現。在位于慕尼黑的西門子實驗室,只要提供產品生產工作單,機器人就可以自主選擇如何組織動作執行任務。與此同時,慕尼黑科技大學的一支聯合團隊正在研究如何使這類機器人在生產過程中與人類安全互動。
Georg von Wichert的實驗室里到處都是機械臂。有的有兩根“手指”,有的則是三根。在不久的將來,有的機械臂甚至可能配備像人手一樣的機械手。通過編程,這些來自不同機器人制造商的機械臂可以夜以繼日地不停抓取和放置同類物品。另外,它們甚至可能能夠完成以前從未有人完成的工作。
配備多種傳感器和創新軟件后,機械臂或許能在裝配線上與工人并肩協作,將電纜交替接入電子設備、測試連接、拋光屏幕,甚至根據工人的動作提示轉而執行新任務或不斷切換任務。所有這些動作的執行都無需重新編程。西門子中央研究院的Georg von Wichert是機器人、自主系統和控制研究小組的負責人,他表示:“我們希望實現的目標是告訴機器人應該做什么,而不是如何去做。簡而言之,我們希望由‘它’自主決定在執行任務時需要做些什么。”
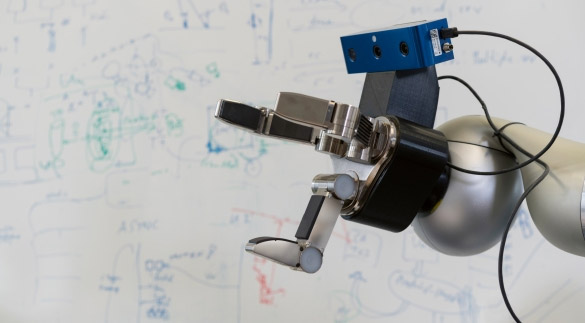
當機器人伸出它的三叉鉗去抓取物體時……
……它會實時計算出相關的優化動作
……它的計算依據多個傳感器的數據融合。
要理解這一愿景的革命性意義,必須明白以下兩件事:這項技術將改變游戲規則,并讓建設機器人制造單元的成本降低50%左右。Kai Wurm在西門子中央研究院負責一個自主系統的項目,他解釋道:“目前,我們需要為機器人做出的每個動作進行復雜的編程。而在未來,它收到的將不再是一條條程序,而是一份工作單。那時,我們將不用再編寫五頁長的代碼去讓機器人按照規定順序完成動作來裝配一個簡單物品,而只需向其任務,然后系統就會自主把任務的技術參數轉換為程序。”
自動化靈活性
為什么這一點極為重要?一言以蔽之:經濟性。為了最大限度提升競爭力,大部分制造商都想減少生產批次,加強產品個性化定制。然而,在傳統生產技術的條件下,只能通過兩個途徑實現這一目標:盡可能詳盡地為每個可能變量進行編程,然而這很可能會變成一項極其復雜、耗時且成本高昂的工作,它顯然不適用于小批量生產。或者可以增加生產線上的工人數量,但由于客戶需求瞬息萬變,且工人需要相關培訓,這種做法不僅成本高昂,而且不切實際。

新任務?沒問題。未來的機器人無需詳盡的指示,就能裝配過去從未見過的物品。
那么,解決方案是什么呢?我們可以稱它為自動化靈活性(automated flexibility)。它的工作原理可以歸納為一個聽起來相當簡單的過程:在收到裝配任務的明確指示后,機器人將獲得一個零部件列表及其幾何形狀的相關模型。依據這些信息,它可以計算出各式各樣的動作。就算你需要在幾個小時后改變訂單,這些機器人也*實現。von Wichert表示:“這一系統的絕妙之處在于只要給它一個新的任務描述和不同物體模型,它就能裝配出新物品,而無需重新編程。”
雖然這些生產線上的機器人系統并不能自己想出管理一座工廠的方法,但它們確實具備一定的自主性。例如,當這種機器人伸出機械臂去抓取物體時,它會整合來自頭部和手部的攝像頭等傳感器傳來的數據,實時計算出相關的優化動作。當它做出行動時,它知道自己必須避免觸碰到其他物體,尤其是身旁的人類。
在面對錯誤和新情境時,使用von Wichert實驗室開發的軟件的機器人已經開始展現出它們的靈活性。例如,如果某個組件無法插入插槽,那么機器人將嘗試改變角度,再試一次。盡管大多數機器人的夾具(機械手)只能抓取單個預先定義的物體,但von Wichert實驗室里的機器人可以使用同一個夾具來抓取五花八門的物體而無需改變硬件。Wurm指出:“我們所開發的系統的新穎之處在于,它能根據概括性的任務描述,自動生成具體動作。”
生產搭檔?
這項技術將有可能極大地提高靈活性。目前,西門子的研究人員與慕尼黑科技大學的一支聯合團隊正在合作探索未來制造業最大的技術趨勢之一:人類與機器人之間的協作。慕尼黑科技大學的博士生Gerold Huber表示:“我們實驗室中的很多人都認為產品的多樣性及相關裝配步驟將出現爆炸性的增長。這將產生對機器人與人類靈活合作這一混合生產模式的巨大需求。”
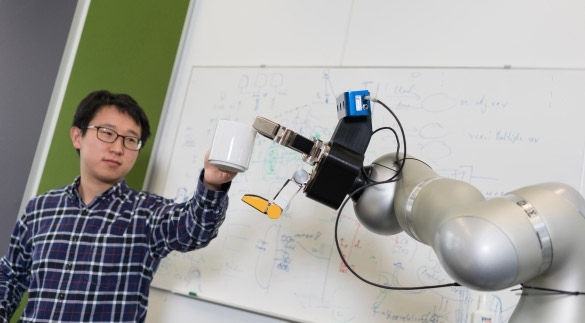
為此,西門子與慕尼黑科技大學聯合小組正在研究人類與機器人如何在生產環境中互補,以及如何優化它們的“社交”互動。例如,盡管未來的工廠機器人將配備視覺和力量傳感器以讓它們在即將發生碰撞時往后退,但它們絕不應該太靠近人的臉部。

研究人員正在探究如何優化機器人與人類工人之間的“社交”互動,如運動速度。
運動速度是另一個社交因素。如果機器人距離最近的人類有兩、三米遠,那么它應當根據需要盡可能地快速運動;但如果它很靠近工人,那么它的運動速度應當隨之降低。與此相關的概念是機器人運動的“易辨識度”。當工人與機器人合作時,機器人的動作必須足夠緩慢、足夠清晰,以便人類可以判斷機器人接下來的行為。Huber說:“我們將在動作規劃系統中加入諸如此類的特性。”
望向未來的實驗室
在慕尼黑南部的西門子中央研究院中,von Wichert和他的同事正在實驗室中部署一個配備六只機械臂的微型生產中心。像人手一樣的夾具能夠抓取它們此前從未見過的物體。這標志著研究人員又向裝配復雜部件的目標邁出了新的一步。von Wichert說:“很快,這些機器將能夠理解拿起一個東西并將之裝到另一個東西上的含義,它們將從不斷積累的經驗中學習并為自己重新編寫程序。這就好像打開了一扇通向嶄新世界的大門。”